PID in series with 1st-order roll-off filter
A practical broadly used architecture which accounts for noise attenuation and frequency-domain robustness

Contents
- Enter process data and derive approximate model
- Set performance and roll-off weights
- Define augmented plant for mixed sensitivity design
- Build controller as a PID with 1st-order roll-off filter
- Run hinfstruct
- Retrieve results for PID and form aggregate controller
- Show step responses of process and approximate model
- Check roll-off property
Enter process data and derive approximate model
s = tf('s'); Gprocess = tf(1,[1 1],'ioDelay',0.5) ; % 1st-order process system with delay Gmodel = pade(Gprocess,4); % pade approximation of process
Set performance and roll-off weights
Performance weight
A = 0.01; % steady-state offset less than A M = 1.2; % amplification of high-frequency noise less than M wB = 1; % closed-loop bandwith higher than wB wS = (1/M)*(s/wB + M)/(s/wB + A); % weight
Robustness weight accounts for uncertainty/noise in the high-frequency range
lfG=0.001; % desired low frequency gain hfG= 40; % desired high frequency gain wc= 5 ; % desired crossover wT=(s+wc*lfG)/(s/hfG+wc); % bodemag(wS,'b-',wT,'r--'); grid; legend('Sensitivity weight','Complementary sensitivity weight');

Define augmented plant for mixed sensitivity design
P = augw(Gmodel,wS,[], wT); % augmented plant for mixed sensitivity design %
Build controller as a PID with 1st-order roll-off filter
Cpid = ltiblock.pid('C0','pid'); FrollOff = tf(wc,[1 wc]); % set unit DC gain roll-off filter Call = FrollOff*Cpid ; % overall controller as series of blocks CL0 = lft(P,Call); % form closed-loop interconnection
Run hinfstruct
[CL,gam] = hinfstruct(CL0);
Final: Peak gain = 1.29, Iterations = 63
Retrieve results for PID and form aggregate controller
CpidFinal = pid( getNominal(Cpid, CL) ), % PID block Cfinal = getNominal(Call, CL); % aggregate controller (pid + roll-off)
Continuous-time PIDF controller in parallel form:
1 s
Kp + Ki * --- + Kd * --------
s Tf*s+1
With Kp = 1.02, Ki = 0.796, Kd = 0.298, Tf = 0.000456
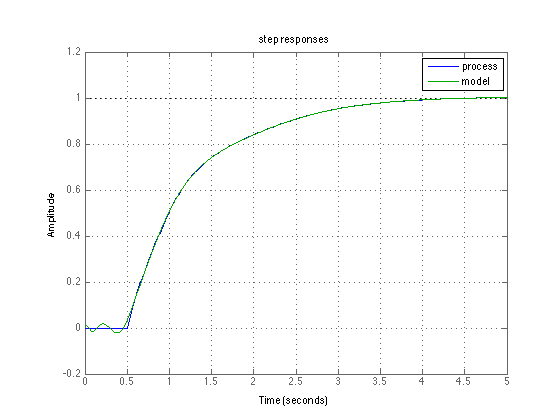
Show step responses of process and approximate model
Tprocess = feedback(Gprocess*Cfinal,1); Tmodel = feedback(Gmodel*Cfinal,1); step(Tprocess,Tmodel,5); grid on; legend('process','model') ; title('step responses');
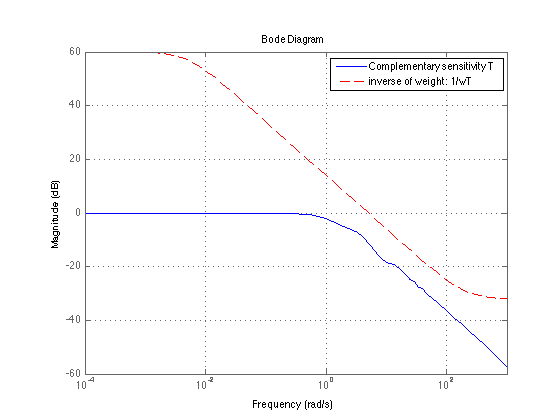
Check roll-off property
bodemag(Tprocess,1/wT,'r--'); grid on; legend('Complementary sensitivity T','inverse of weight: 1/wT') ;